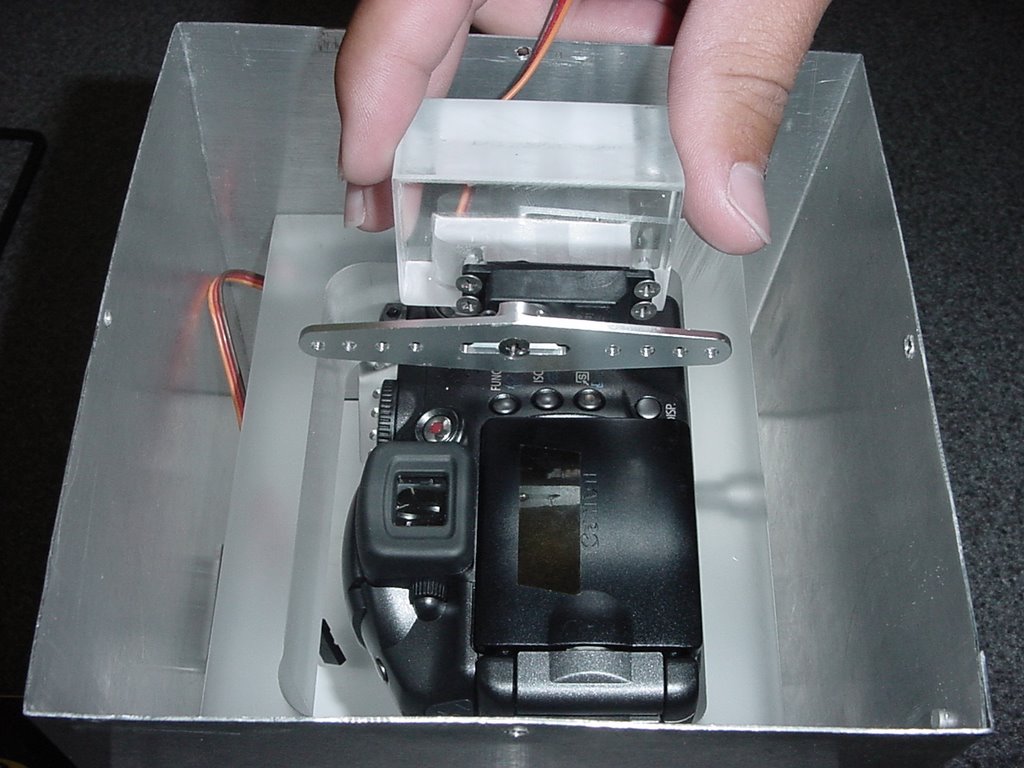
This is what GeoCam looks like:




Any questions ?
We are less than a week before integration of our payload at LSU and we are making some progress in the building of the frame and some of the automated parts of the payload. Case in point: the clicker (watch it click here)
- The mechanical finger has been mounted to the bracket and tested today. It works great.
Monday is the day the whole camera bracket should be finished. The attachment of wires from the servo to the bracket for the swivel mechanism and mounting are our last big structure tasks.
- There was a video taken of the camera taking pictures using the mechanical finger, it will eventually be available.
-The program for the servos does work. The timing of the servos to work together is okay but the actual time intervals have not been entered into the program.
-The circuit board for the servos has been completed.
-The power converters were tested today to insure they were delivering the correct voltages. Half of the voltage was being delivered because the resistors we used were equivalent to the internal resistance of the camera. By using smaller resistors the desired voltages were obtained.
-A heat reflective, thermal blanket was purchased and will be used to insulate the camera when we test the temperatures again.
Recent completions
-In addition to the half of the aluminum box, the bracket for the camera has been fabricated. A thick chunk of clear plastic was used to create the bracket because of its strength and resistance to breakage. All of our components must be able to withstand the approximately 10g's they will experience when the balloon parachute deploys. Not all of the corresponding holes for attaching the bracket to the box have been drilled. One hole has been drilled on the bottom side of the bracket to aid in mounting the camera for testing. The cut out for the servo that acts as the mechanical finger has also been completed. The servo must be mounted to the bracket so that it moves with the camera.
-A program has been compiled to synchronized the servos using the microprocessor.
-Testing of the camera has revealed the normal temperature increase of various parts of the camera body while sitting in room temperature conditions. From those tests we have concluded that the camera will most likely turn off because it is not producing enough heat to keep the internal temperature in the operating range. More tests with the finished housing and insulation will be performed in a controlled chamber. With the use of the chamber will be attempting to simulating the atmospheric temperatures that the box will experience once it has been launched.
The project has been subdivided into different tasks.
Summaries of the tasks so far:
Design and fabrication of the GeoCam housing - GeoCam will be attached to a bracket, which will be mounted to a rectangular aluminum box. So far, half of the aluminum box has been fabricated.
Preparation for integration of GeoCam with the HASP balloon in Louisiana - A checklist of tests we need perform must be created to insure that GeoCam is working properly once it has been integrated
Servo Controls - Two servos are being programed for use: the program for one of the servos has been finished and is going rotate the camera during the flight, the second is going to serve as a mechanical finger to push the button on the camera to take pictures. The GeoCam camera can take a set number of up to 10 pictures continuously. The button on the camera must be pushed for each set of pictures, which is the purpose of the second servo.
Power Connection - The power supplied being delivered from the balloon is more than we need for our components so it had to be stepped down to the desired voltages. This was not a huge problem for our servos but the 7.4 V camera posed a challenge.
Design and implementation of the swinging element - The camera will rotated back and forth at timed intervals to insure that the images taken will not be duplicates. The rotation will be controlled by a servo that is programmed to rotate at the set interval. The arms will have some type of stiff wiring running from the servo arm to the camera. When the servo arm rotates it will push or pull on the camera, thus swinging the camera.
Design and implementation of a clicker - We need a mechanical finger to trigger the image taking process while the camera is in flight. Our solution was to have a metal piece connected to the arm of a servo. When the arm rotates the metal piece presses the button on the camera.
Design thermal insulation for the camera - There are temperature constraints with our camera; it has a functioning range of 0-40 degrees Celcius. The temperatures that GeoCam will encounter while be lower than the operating temperature. That means that we will probably need sometime of insulation to keep the camera from shutting off.
Programming the microprocessor and integrating the electrical components - The actual microprocessor is what is being programmed to control the two servos. The compiler we were using only allowed a certain number of lines in the programming. The limited amount of lines made it difficult to program the servos to be synchronized. All of the power and electrical components have to be connected onto one circuit board.
Design and implement a data processing capability to display information from HASP into google maps - One of our most difficult challenges will be processing the images from the camera so that they can be used in correspondence with google maps. GPS technology located in the balloon's paylod will aid in the superimposing of the images onto current maps.
The people involved in the GeoCam's development can be found here. It is a group of Texas A&M University students working at the Student Engineering Institute with supporting staff from the Spacecraft Technology Center.
