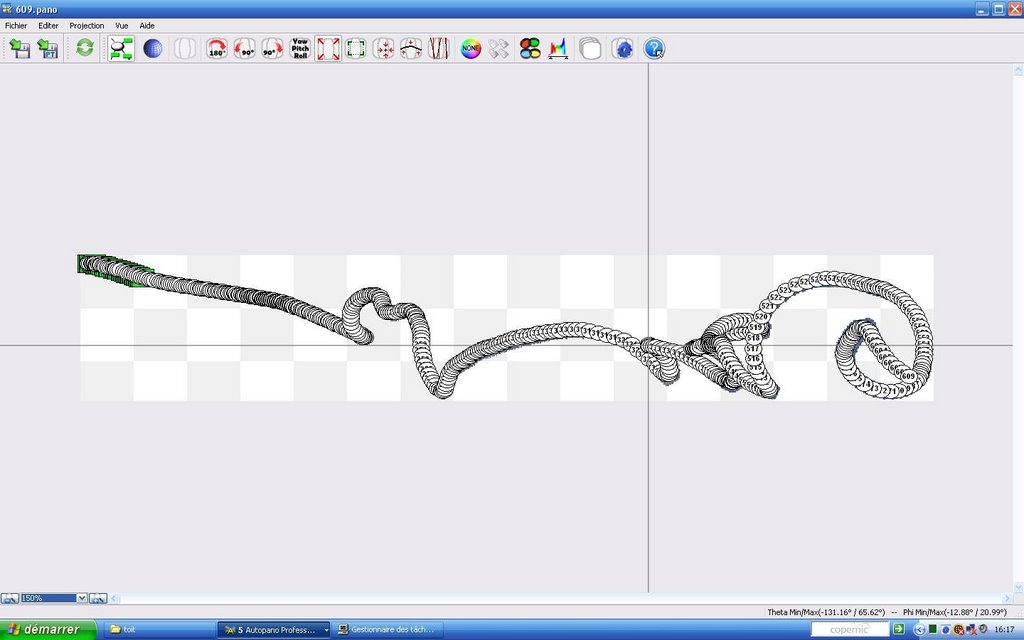
This is what the large panorama looks like. When you create it as a PSB file (Photoshop) using the latest version of Autopano Pro, it is about 51 GB large. It is taking time for us to open it and save it in a format that is viewable on the web (Zoomify).
Thursday, December 21, 2006
New Mexican View
Hyper-GeoCam

We just sent a proposal to LSU to fly on the second HASP flight with a modification of the current camera. We are now aiming to build a cheap hyperspectral imager.
Orders of Magnitude Resolution Estimation for Digital Cameras at High Altitude
One of the reason for our successful flight is linked to the quality of our photographs. When flying at 36 km altitude, we are roughly at one tenth the altitude of either the International Space Station (ISS) or imaging satellites. For cameras similar to ours, shots taken from the ISS have therefore 10 times less the resolution. Case in point, the LUECKE sign near Bastrop, TX. This sign was used by NASA to evaluate the resolution of astronaut acquired photographs from the ISS.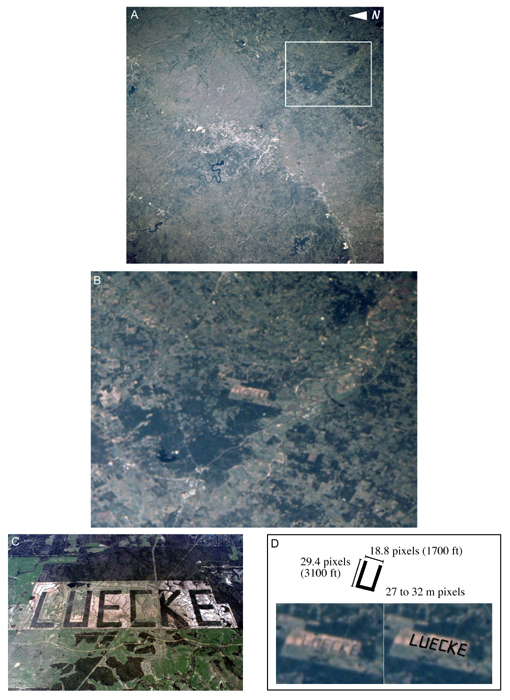
Calculations show an equivalent of 27 to 32 m for a pixel. The same sign can be seen on Google Maps here. Our previous comparison with Google Maps shows a 1 m resolution for a pixel or imagery details like this one.
Wednesday, December 20, 2006
Sites and Projects we like

* The Global Connection Project: a project with CMU, Google and NASA Ames aimed at using a panorama approach to stiching photos together to produce imagery in case of natural disasters. This is pretty much our approach. They started before us but we just stumbled on their site recently.
* the Multi motif Stratospheric experiment: A team of swedish students who will be performing an experiment similar to ours. But they also have access to a rocket.
* StratoCat: a comprehensive and up-to-date site on high altitude balloons worldwide.
* Post storm imagery from the NOAA. Look out! the whole database of images is about 10 GB.
* Astronaut acquired photographs.
* Another experiment called GeoCam that flew a set of cameras on board the Space Shuttle in 1993.
* NOAA Balloon flights.
* Kite Aerial Photography.
* CU Spaceflight balloons.
Wednesday, December 13, 2006
Off to Louisiana

Some of us will be attending a UAV workshop for disaster monitoring and present a poster of our work doing panoramas. The presentation is available here. We will also send a proposal for the next HASP flight before the end of the week.
Thursday, November 09, 2006
Space Vantage Points

When Nadar went up his balloon 150 years ago and took the first aerial photo, he triggered Jules Vernes into writing "Five weeks in a balloon".
The first panoramic view of a natural disaster was taken one hundred years ago after the 1906 San Francisco Earthquake using a kite.
The first photo taken from space was obtained in 1946, from a V2 rocket and the first panorama in space was taken two years later.
Sixty years later, thanks to the HASP platform, we took one of the longest panoramic view from a high altitude balloon. This is mainly due to our ability to store large amount of data in common cameras (4GB).
Tuesday, October 17, 2006
Very Large Panoramas are coming up
We have used the Autopano software to stitch together very large panoramas made up of most of the usable images taken by GeoCam during the HASP balloon flight. Out of 4 GB of memory, there was a minimum of about 2 GB of data that could be used and stitched nicely. The remaining pool of images has too many clouds to allow for scene recognition. The largest panorama is some type of record being 3.7 GB large. However it is sparse and therefore is much smaller when it comes to actual pixel counts (100s of MB). They should be up soon.
Wednesday, October 04, 2006
Comparing Satellite Imagery and GeoCam Data
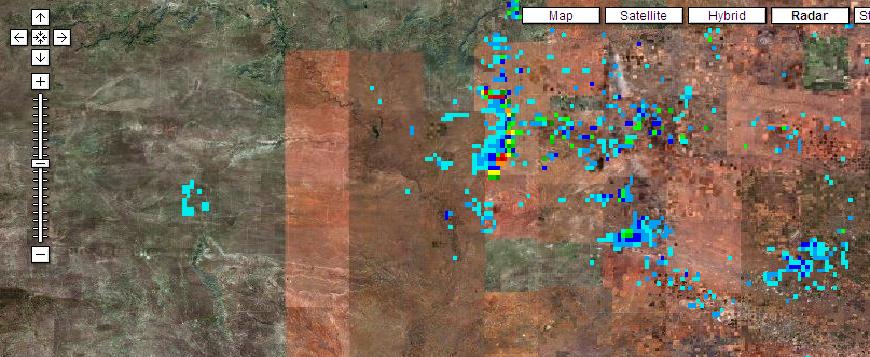
Here is a comparison of images taken by GeoCam (at 36 km up with a Canon Camera) and those taken by Satellites and featured on Google Maps. This is just before entering Moriarty, NM:

and a frame taken by GeoCam at the same scale

The level of detail afforded by GeoCam is comparable to the next best resolution provided by Google Maps.


Pedro has estimated that one pixel on GeoCam is about 3.3 feet. Potentially, GeoCam could be provide coverage for a larger swath of land as, in this flight it was tilted at 20 degrees angle from Nadir.

More on that later.
Saturday, September 30, 2006
Being Slashdotted.
Welcome Slashdot. For those of you who are interested in following up on what we are going to do with the data (google maps, Earth, video, high definition desktop background, torrents,...), our RSS feed is at http://hasp-geocam.blogspot.com/atom.xml
We will be responding and expand on the comments of the previous entry on panoramic views in the upcoming days.
Panoramic views
[Slashdot readers]
An interesting use of the data from GeoCam is to see how stitching algorithms are performing with data from our balloon flight. An algorithm developed by Matthew Brown does this automatically through the comparison of SIFT points and a RANSAC algorithm determining good fit. The software is available at the AutoStitch web page.
We first tried stitching five photos together and obtained a reduced file (200 KB as opposed to 5 times 3.2 MB)
We then went on using about 100-200 frames per panoramas and obtained the following views:
It seems evident that the payload wasn't turning at 1 rpm.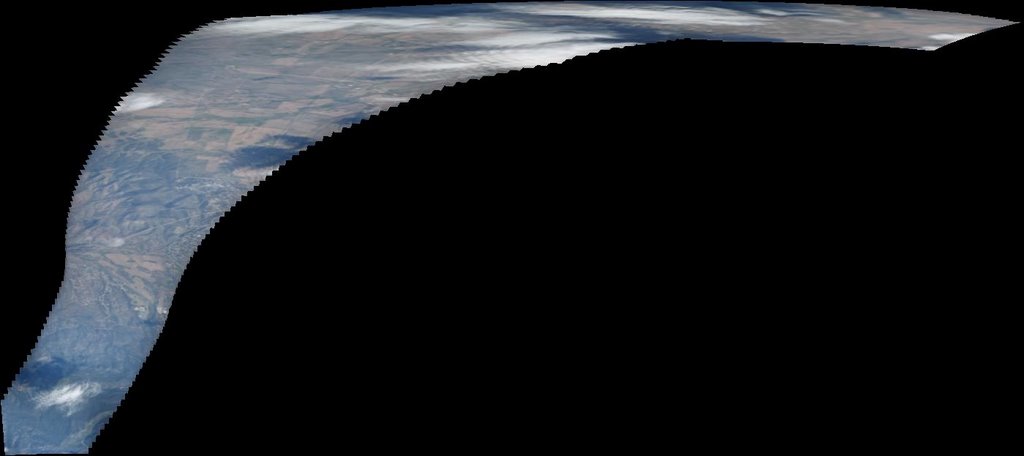

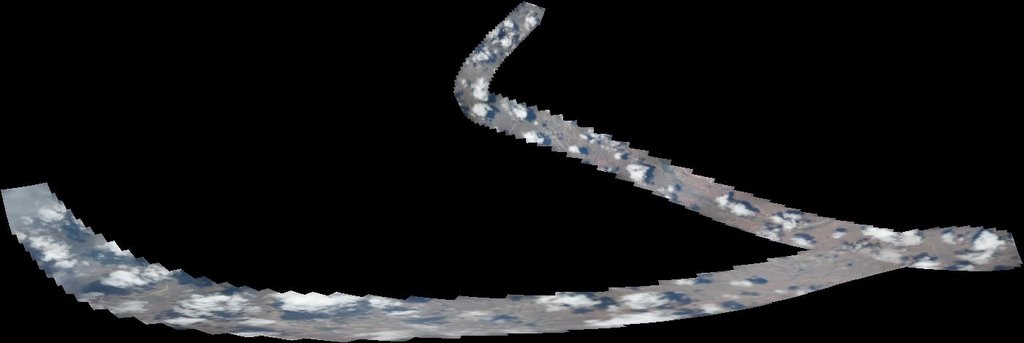

One of the apparent issues seems to be that the comparison for overlap between frames was based on cues from the clouds. Since we took photos at intervals of about 23 seconds, some of these clouds changed location and eventually allowed for some of the panoramas to be unduly stretched.
Thursday, September 28, 2006
Panoramic views - Preliminary results
An interesting use of the data from GeoCam is to see how stitching algorithms are performing with data from our balloon flight. An algorithm developed by Matthew Brown does this automatically through the comparison of SIFT points and a RANSAC algorithm determining good fit. The software is available at the AutoStitch web page.
We first tried stitching five photos together and obtained a reduced file (200 KB as opposed to 5 times 3.2 MB)
We then went on using about 100-200 frames per panoramas and obtained the following views:
It seems evident that the payload wasn't turning at 1 rpm.
One of the apparent issues seems to be that the comparison for overlap between frames was based on cues from the clouds. Since we took photos at intervals of about 23 seconds, some of these clouds changed location and eventually allowed for some of the panoramas to be unduly stretched.
Thursday, September 21, 2006
WOW

Pam and John opened the camera an hour ago and found 1650 images. This is mission success. Each image is about 3.7 MB. We are beginning to work on implementing an interface so that it can be browsable to the rest of the world. The image of this entry is one of these shots taken by GeoCam.
Wednesday, September 20, 2006
NASA Balloon Carries High Altitude Student Platform to the Edge of Space
NASA just came out with a press release on the whole HASP program, take a look at it here.
After reading about this story on Slashdot, I noticed in the comment section that last year, some other team did something similar to our project but it looks like their camera froze on the way up. Our current expectation is that the camera might have gotten very warm once it reached 120,000 feet. We'll see when the payload arrives home. A related effort at NOAA is similarly interesting. We believe that the main difference between all these payloads and ours is our stated goal of making a mapping of these pictures onto real maps (google maps). Our camera was specifically focused to get the most detail out of the landscape whereas most of the helium balloon shots seem to have looked at the wider angle to get shots of "space".
Tuesday, September 12, 2006
Coming home

The crates should have been picked up at Ft. Sumner today and we expect to see them at LSU later this week.
Thursday, September 07, 2006
HASP recovery

The HASP payload, parachute and balloon have been recovered successfully. A brief damage assessment was undertaken and the experiment is going to be packed for shipment back to LSU, and then back to Texas A&M.
We are anxiously waiting for the arrival of GeoCam to evaluate how bad the cloud cover was.
Tuesday, September 05, 2006
Fort Sumner, HASP has landed

According to Greg Guzik:
The HASP flight ended at 9:19 UTC today with termination of the balloon. The payload parachuted down, slowing to a speed of about 20 feet / second and impacted at 112 deg 0.45 min W, 35 deg 47.0 min N at 10:02:20 UTC. This location is just a bit south of the Grand Canyon. Needless to say, this was an exciting balloon flight termination. In preparation for termination, the student payloads were turned off at 8:05 UTC. Thus, the HASP flight was 18 hours 12 minutes long and all payloads were at a float altitude of at least 111,800 feet for about 13.5 hours. We are expecting to get HASP back to Ft. Sumner within a couple of days.
Monday, September 04, 2006
Launch and CosmoCam control
HASP was launched at 9:50 am (15:50 UTC) this morning. The payload is now climbing through 7000 meters. Watch CosmoCam for the release of the glider at about 30,000 feet. After that CosmoCam is available for use by anybody.
Sunday, September 03, 2006
It's all your fault, John!

Greg Guzick tells us the following:
The weather just could not give us a break this morning, and a new line of rain storms are developing to the west of us and heading this way. Thus, we have canceled the launch attempt today and will try again tomorrow. In fact, tomorrow’s launch weather should be much, much better. The down side is that Tropical Storm John will be moving up the Baja coast and setting off thunderstorms in the Arizona southwest where HASP is predicted to impact following termination. Thus, with a launch tomorrow we may need to cut down early, resulting in only 10 hours at float.
The new launch target is Monday, September 4 at 7:30 am (13:30 UTC). Pre-launch ops will begin at 3:30 am and pickup will be at 4:00 am.
John is moving off the Baja coast.
Saturday, September 02, 2006
Bad (weather today) is Good (for us tomorrow)

Here are the news from Greg Guzick:
The cold front that has brought some amazingly bad weather to the area today is expected to move further south during the day and evening resulting in improving conditions here. In addition, the high altitude winds continue to slow and current predictions are for about 16 hours at float. Thus, we will be attempting to launch HASP tomorrow morning. Activities will begin here at about 3:30 am Mountain time, targeting a launch time of about 7:30 am Mountain (13:30 UTC). As surface winds are expected to continue to decrease during this time period, launch could be delayed several hours.
CosmoCam will be running during most of the pre-launch period and there may be occasional audio commentary. Live views of the launch area from the tower can be obtained from the CSBF website.
Friday, September 01, 2006
Tic toc tic toc
Here is the latest from Greg Guzick:
The weather brief today is still projecting good weather for Sunday (9/3) morning. In addition, the high altitude winds are starting to come down. Currently we are projecting 15 hours at float. A final decision to go for the Sunday launch will come after tomorrow’s weather brief.
Thursday, August 31, 2006
New Launch Window
Because high altitude winds are still at about 40 knots and low altitude weather is likely to be problematic. The launch window for Sunday, September 3 at 7:30 am mountain time (13:30 UTC) appears to be more favorable.
Wednesday, August 30, 2006
Hanging Tough
 Here is the word from Greg Guzick:
Here is the word from Greg Guzick:
HASP has successfully completed the last hurdles prior to flight; the “hang test” (compatibility test) and the Flight Readiness Review. Thus, at the next opportunity we will launch. As today’s weather briefing an opportunity for launch on Friday 9/1 at 7:30 am local (13:30 UTC) was identified. However, there is a front that may move through the area too quickly bringing high speed low altitude winds. The next, and better looking, opportunity is Sunday 9/3 at 7:30 am local. In either case the high altitude winds are clocking along at 30 to 40 knots. This would bring us to the end of our 550 mile range in about 12 to 14 hours. We will probably be able to make a decision about whether to try for the Friday launch after the Thursday weather briefing at 2:00 pm local (20:00 UTC).
The Google map tracking will also provide you with an idea of where the payload is currently located. Finally, we are expecting to bring the CosmoCam video online within the next day.
For the next several day events may progress rapidly. There we have added a “HASP Status” box on the HASP main page. I will be using this “status box” to distribute the latest news as we get closer to launch. Stay tuned.
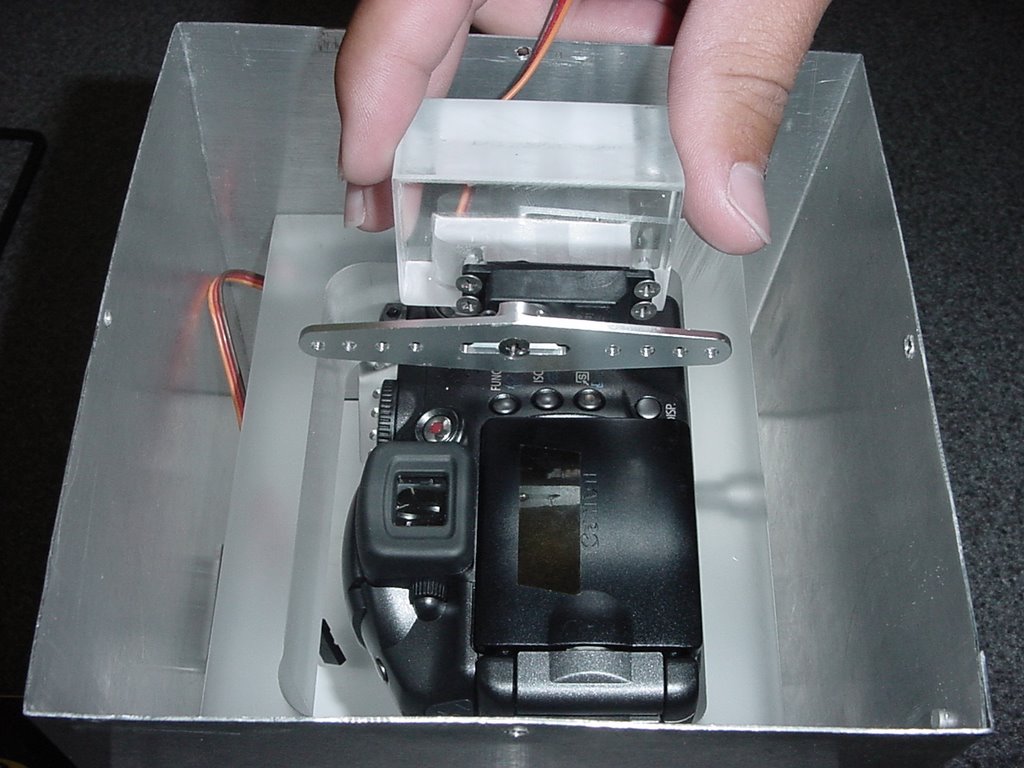
GeoCam is located on the left on this image taken during the Hang test.

NEXRAD readings can be found here. There is also a Google Mash up with Nexrad results for the U.S. at itsweather.com.

More images of the hang test can be found here. The new CFP for next year can be found here.
Haze over Nuevo Mexico

Sunday, August 27, 2006
It may get cold but we ain't gonna trip

John and I decided to cut the wires for the heaters for two reasons:
- Greg Guzik was not too happy when our amp count was over our self described limit of 0.5 amps.
- We don't know if there is a possibility our amp drawing might trip the fuse set on our payload (1 amp).
Since we did not have any resistance off hand, we decided that, given the fact that the camera would at least produce about 4 watts of heat, it would be able to survive the cold temperatures on the way up and at cruising altitude. I believe we can deal with the uncertainty on the temperature (computed to be OK for an ideal one node case) than the possibility of tripping and shutting down our payload. [ This was written before John left. He and Franky decided to leave the heaters on ]
The payload was cycled through several power on and off of the whole HASP payload and it was shown that our camera started as expected. Our request to the Balloon folks is to power us on as soon as HASP launches. John should have several shots of another balloon sent off yesterday.
Saturday, August 26, 2006
How hot is it going to get ?
Here is a small spreadsheet showing the one node computation that features what happens if we use black or white paint on the outside of the GeoCam box. That box is gonna be white....
John and Franky tested the power-on/off behavior of the camera which acted as it should. They have a concern that the servo pushing the clicker might be pushing too far but the folks at HASP integration told them it would be OK.
There is an expectation to have the flight go for twenty hours. After that, it will be flown by the folks at NASA back to Fort Sumner where it will be shipped back to LSU. We should be either picking up our payload in Louisiana or have it Fedex'ed.
New Item on the checlist: wipe out the card before leaving.
John and Franky should be heading back home today.
Friday, August 25, 2006
Labor Day Launch ?
Here is the latest from Greg Guzik:
Flight Requirements Review went well. We are looking for a desired 20 hour flight at an altitude of 124,000 feet. The maximum lift of the 11 million light is 2,875 pounds and the HASP weight is about 1,850 pounds (including 400 pounds drive up ballast). We may or may not be able to carry more ballast to maintain altitude after sunset. The limit is imposed by the parachute load which is currently set at 2,000 pounds.
We are expecting to complete integration this weekend and do the official hang test next Monday (August 28). At that point we will be Flight Ready and we are projecting a launch window from August 29 through September 8.
There will be a test flight launch and at least a 24 hour standdown prior to HASP launch. Thus, HASP will not launch until after the pathfinder and at least 48 hours after the initial launch. Current best GUESS from the CSBF folks is a HASP launch sometime around Labor Day weekend. Regular weather briefings will begin early next week.
For those of you not in the U.S., Labor day is September 4 this year.
Thursday, August 24, 2006
Waiting to Image
Integration of HASP with the CSBF systems will occur between August 21 and August 24. GeoCam should begin integration on Friday. Flight Readiness Review is expected for August 28. HASP will be a dawn launch and the first flight opportunity might be as early as August 29. According to Greg Guzik, the HASP manager
However, there is no guarantee for a launch on any particular day, range of days or before or after a day. This is due to a combination of ground weather conditions plus high altitude wind direction and speed. AT BEST, we will have 24 hours notice of a POTENTIAL launch. Be aware that it is NOT unusual for a POTENTIAL launch to be canceled. It is also not unusual for the payload to be rolled to the launch pad and everything be setup (except for taking the balloon out of the box) and the launch be canceled. (It is unusual for the launch to be canceled if the balloon is out of the shipping crate.) We may, therefore, wait days to a week or two for the right conditions.
John and Franky are leaving this morning for the Fort Sumner airport.
Monday, August 21, 2006
Orders of magnitude
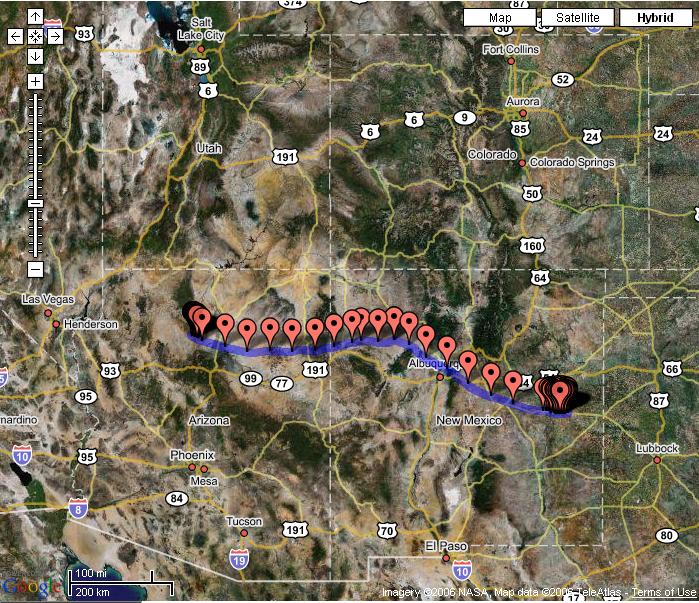
It looks like our imaging capability will allow us to record data for about 600 kms (at 50 mph balloon speed) on a swath of land of about 20 kms. HASP will be at 120,000 feet (or 38 kms) up and we are taking a 15 degree tilt angle for our camera in order to take full advantage of the rotation induced by the balloon (see previous entry.)
We will launch from Fort Sumner, New Mexico. Here is what a our trajectory could look like over New Mexico and Arizona. The same dimension can be mapped over other regions of interest for our type of project: New Orleans and the Mississippi coast and California.
Saturday, August 19, 2006
Trajectory analysis - avoiding Murphy's law.
Much of our design rests on an assumption that using the swinger servos, we can pretty much cover a nice swath of land (as opposed to just looking down or Nadir). In order to accomplish this, we designed the swinger servos that would allow us to cover larger land mass by swinging the camera back and forth. However, HASP has the particularity of letting its large payload rotate at a speed of about 1rpm. Why not use the payload rotation to replace the movement we provide with the swinger servo ? This is what we are considering.
If you evaluate the swath of land being swept here is what you obtain (no payload spin):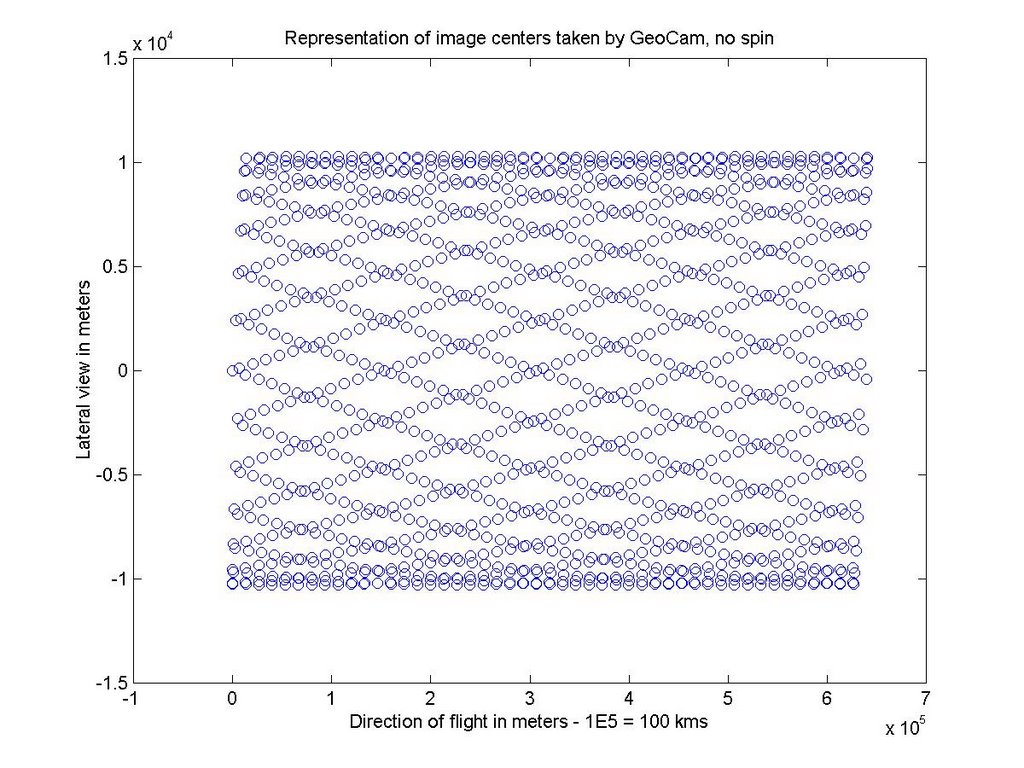
This result can be obtain by changing everytime the swing angle of the camera as shown here:
Whereas if you tilt GeoCam sideways (15 degree angle) and use the rotation of HASP this is the swath you obtain: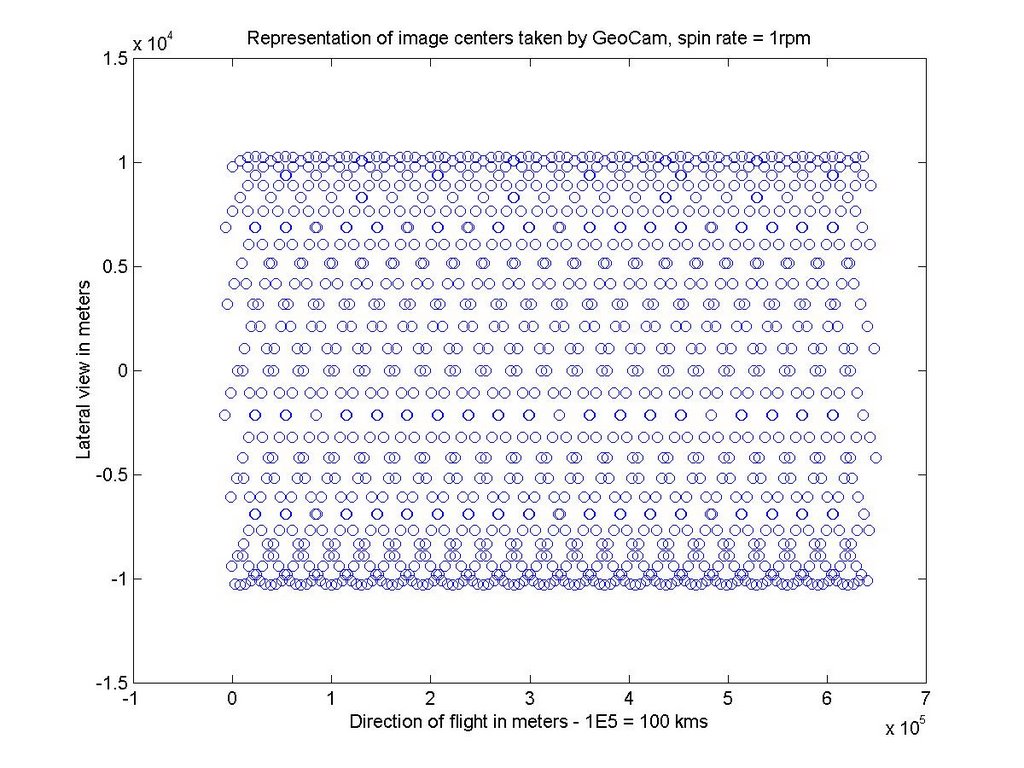
with a constant swinger angle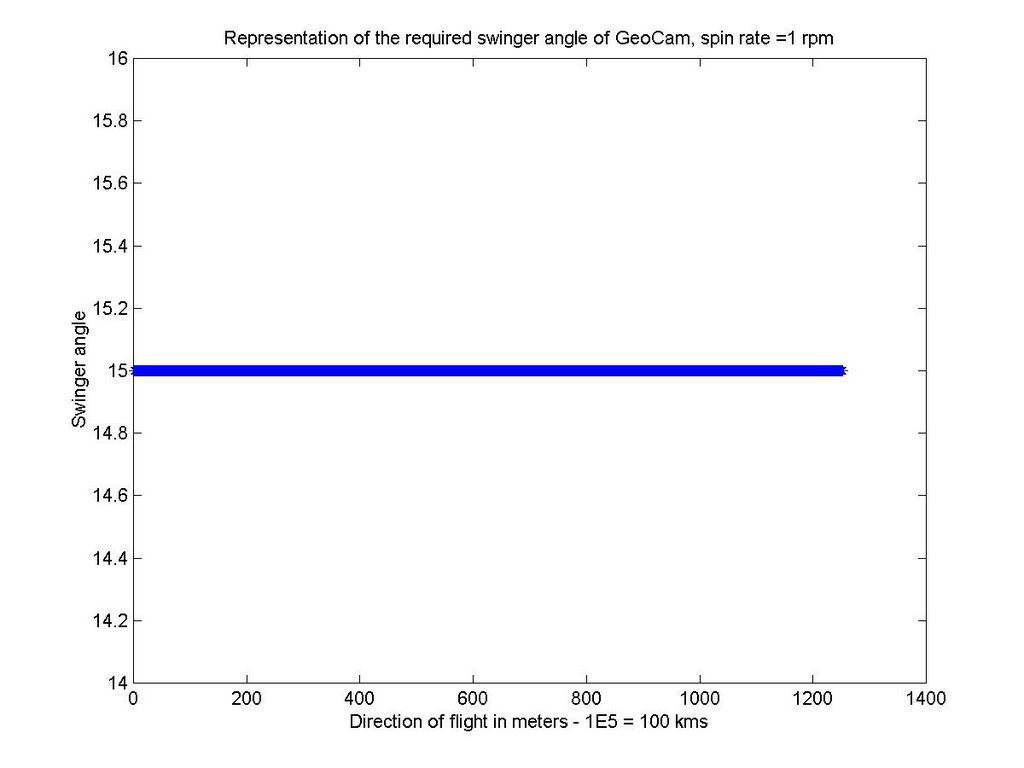
Not having to use the swinger servo and using HASP rotation might be a good option.
Here is the short matlab program that produced these figures (one might note we are taking a picture every 23 seconds.)
clear
alt=120000*.32;
t=[0:23:8*3600];
%th=10*sin(pi/10.*t./23);
th=15*sin(t./600*2*pi);
dist=tan(th/180*pi)*alt;
omega=2*pi/60;
v=50*1.6*1000/3600;
r=1.06+dist;
x=v.*t+r;
y=r;
figure(1)
plot(x,y,'o')
xlabel('Direction of flight in meters - 1E5 = 100 kms')
ylabel('Lateral view in meters')
title('Representation of image centers taken by GeoCam, no spin')
figure(2)
plot(th,'*')
xlabel('Direction of flight in meters - 1E5 = 100 kms')
ylabel('Swinger angle')
title('Representation of the required swinger angle of GeoCam in the no spin case')
%
th=15*ones(size(t,2),1);
dist=tan(15/180*pi)*alt;
r=1.06+dist;
x1=v.*t+r.*cos(omega.*t);
y1=r.*sin(omega.*t);
figure(3)
plot(x1,y1,'o')
xlabel('Direction of flight in meters - 1E5 = 100 kms')
ylabel('Lateral view in meters')
title('Representation of image centers taken by GeoCam, spin rate = 1rpm')
figure(4)
plot(th,'*')
xlabel('Direction of flight in meters - 1E5 = 100 kms')
ylabel('Swinger angle')
title('Representation of the required swinger angle of GeoCam, spin rate =1 rpm')
Thursday, August 17, 2006
GeoCam parameters estimation
We set up a small Google speadsheet to compute the GeoCam parameters estimation . It looks like, we can have a resolution of about 1.6 meters or 5 feet on the ground per pixels when looking Nadir. This spreadsheet assumes only longitudinal path. In order to take into account the effect of the swinger (broom like behavior of our set up), we need to make sure that the yellow numbers are well within the blue one (in order to ensure some type of longitudinal overlap between nadir photos.
Tuesday, August 15, 2006
Monday, August 14, 2006
Last Week before Integration

Integration tests at LSU went very well. The LSU HASP project now has a website up and running. We are payload 3 on HASP. They will provide Google Maps tracking of the balloon (we will produce a similar one) and one will to watch the view from the balloon with the CosmoCam (watch a movie here). Current expectation is for the balloon to be launched between August 28th to September 4th. We now need to check if the camera will survive the low temperatures expected at 120,000 feet. For this, we will use an environmental chamber at the Spacecraft Technology Center.
Wednesday, July 26, 2006




Tuesday, July 25, 2006
The clicker is on
We are less than a week before integration of our payload at LSU and we are making some progress in the building of the frame and some of the automated parts of the payload. Case in point: the clicker (watch it click here)
Friday, July 21, 2006
- The mechanical finger has been mounted to the bracket and tested today. It works great.
Monday is the day the whole camera bracket should be finished. The attachment of wires from the servo to the bracket for the swivel mechanism and mounting are our last big structure tasks.
- There was a video taken of the camera taking pictures using the mechanical finger, it will eventually be available.
Tuesday, July 18, 2006
-The program for the servos does work. The timing of the servos to work together is okay but the actual time intervals have not been entered into the program.
-The circuit board for the servos has been completed.
-The power converters were tested today to insure they were delivering the correct voltages. Half of the voltage was being delivered because the resistors we used were equivalent to the internal resistance of the camera. By using smaller resistors the desired voltages were obtained.
-A heat reflective, thermal blanket was purchased and will be used to insulate the camera when we test the temperatures again.
Monday, July 17, 2006
Recent completions
-In addition to the half of the aluminum box, the bracket for the camera has been fabricated. A thick chunk of clear plastic was used to create the bracket because of its strength and resistance to breakage. All of our components must be able to withstand the approximately 10g's they will experience when the balloon parachute deploys. Not all of the corresponding holes for attaching the bracket to the box have been drilled. One hole has been drilled on the bottom side of the bracket to aid in mounting the camera for testing. The cut out for the servo that acts as the mechanical finger has also been completed. The servo must be mounted to the bracket so that it moves with the camera.
-A program has been compiled to synchronized the servos using the microprocessor.
-Testing of the camera has revealed the normal temperature increase of various parts of the camera body while sitting in room temperature conditions. From those tests we have concluded that the camera will most likely turn off because it is not producing enough heat to keep the internal temperature in the operating range. More tests with the finished housing and insulation will be performed in a controlled chamber. With the use of the chamber will be attempting to simulating the atmospheric temperatures that the box will experience once it has been launched.
Tuesday, July 11, 2006
The project has been subdivided into different tasks.
Summaries of the tasks so far:
Design and fabrication of the GeoCam housing - GeoCam will be attached to a bracket, which will be mounted to a rectangular aluminum box. So far, half of the aluminum box has been fabricated.
Preparation for integration of GeoCam with the HASP balloon in Louisiana - A checklist of tests we need perform must be created to insure that GeoCam is working properly once it has been integrated
- Plug into Power Supply
- Correct any Power Issues
- Check Timing of Servos
- Correct Timing Issues
- Mount Camera
- Take Several Pictures
- See how pictures turn out
Servo Controls - Two servos are being programed for use: the program for one of the servos has been finished and is going rotate the camera during the flight, the second is going to serve as a mechanical finger to push the button on the camera to take pictures. The GeoCam camera can take a set number of up to 10 pictures continuously. The button on the camera must be pushed for each set of pictures, which is the purpose of the second servo.
Power Connection - The power supplied being delivered from the balloon is more than we need for our components so it had to be stepped down to the desired voltages. This was not a huge problem for our servos but the 7.4 V camera posed a challenge.
Design and implementation of the swinging element - The camera will rotated back and forth at timed intervals to insure that the images taken will not be duplicates. The rotation will be controlled by a servo that is programmed to rotate at the set interval. The arms will have some type of stiff wiring running from the servo arm to the camera. When the servo arm rotates it will push or pull on the camera, thus swinging the camera.
Design and implementation of a clicker - We need a mechanical finger to trigger the image taking process while the camera is in flight. Our solution was to have a metal piece connected to the arm of a servo. When the arm rotates the metal piece presses the button on the camera.
Design thermal insulation for the camera - There are temperature constraints with our camera; it has a functioning range of 0-40 degrees Celcius. The temperatures that GeoCam will encounter while be lower than the operating temperature. That means that we will probably need sometime of insulation to keep the camera from shutting off.
Programming the microprocessor and integrating the electrical components - The actual microprocessor is what is being programmed to control the two servos. The compiler we were using only allowed a certain number of lines in the programming. The limited amount of lines made it difficult to program the servos to be synchronized. All of the power and electrical components have to be connected onto one circuit board.
Design and implement a data processing capability to display information from HASP into google maps - One of our most difficult challenges will be processing the images from the camera so that they can be used in correspondence with google maps. GPS technology located in the balloon's paylod will aid in the superimposing of the images onto current maps.
The Team
The people involved in the GeoCam's development can be found here. It is a group of Texas A&M University students working at the Student Engineering Institute with supporting staff from the Spacecraft Technology Center.
Wednesday, March 29, 2006
GeoCam: an off-the-shelf imager for high altitude balloons
In disasters of enormous proportion such as Hurricane Katrina, the Asian Tsunami or the recent Pakistani earthquake large swath of terrains were suddenly rendered inaccessible or impossible to image. Satellite access time to these areas meant not having access to imagery for periods of time ranging from hours to days. The delay in access time to imagery is critical at the level of first time responders but increasingly it is becoming obvious that the general population want similar information.
High altitude balloons can be deployed in a matter of hours and provide emergency remote sensing thereby enabling first responder's situational awareness and give adequate trajectories to rescuers. It would also enable the diffusion of imagery to a large segment of the population looking for information thereby reducing the strain on the telecommunication system of the affected area.
With these requirements in mind, we propose to use a low cost Off the Shelf digital camera (COTS) called GEOCam to provide high resolution imagery from high altitude balloons in order to provide geographical information on large areas of interest. Superresolution of images taken by COTS cameras can be obtained through the use of proper image processing of series of frames. We also propose to evaluate the ability to perform photogrammetry in order to estimate 3-d information from a series of frames.
Our outreach plan consists in providing trajectory of the balloon on a Google Maps and Google Earth interface. The result of the diverse image processing performed on the movies and still frames of the HASP campaign will also be featured on the same website. The project will make available how we built the hardware in order to provide this capability to people affected by disasters. The data stream going from the camera all the way to how it was implement as overlays on Google Maps will also be explained in detail.
Our application for the HASP program has been accepted. More on this here.![]()
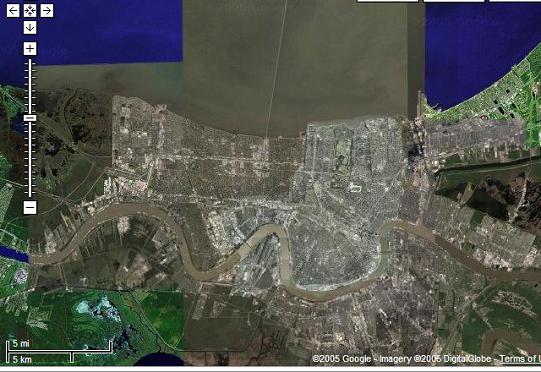
The main difference between a project like ours and others where cameras are flown on UAVs is the ability to image large swath of lands. At 120,000 feet, the ability to cover the whole city of New Orleans becomes a matter of steering the camera rather than an issue of craft navigation. We also expect that the impedance between the world's expectation of instantaneous news and the filtered first responders information stream will only get bigger. Solution like ours would prevent this bottleneck of information thereby providing everyone (including first responders) will clear and valuable information.
Subscribe to:
Posts (Atom)

{kind=link}