Because high altitude winds are still at about 40 knots and low altitude weather is likely to be problematic. The launch window for Sunday, September 3 at 7:30 am mountain time (13:30 UTC) appears to be more favorable.
Thursday, August 31, 2006
Wednesday, August 30, 2006
Hanging Tough
 Here is the word from Greg Guzick:
Here is the word from Greg Guzick:
HASP has successfully completed the last hurdles prior to flight; the “hang test” (compatibility test) and the Flight Readiness Review. Thus, at the next opportunity we will launch. As today’s weather briefing an opportunity for launch on Friday 9/1 at 7:30 am local (13:30 UTC) was identified. However, there is a front that may move through the area too quickly bringing high speed low altitude winds. The next, and better looking, opportunity is Sunday 9/3 at 7:30 am local. In either case the high altitude winds are clocking along at 30 to 40 knots. This would bring us to the end of our 550 mile range in about 12 to 14 hours. We will probably be able to make a decision about whether to try for the Friday launch after the Thursday weather briefing at 2:00 pm local (20:00 UTC).
The Google map tracking will also provide you with an idea of where the payload is currently located. Finally, we are expecting to bring the CosmoCam video online within the next day.
For the next several day events may progress rapidly. There we have added a “HASP Status” box on the HASP main page. I will be using this “status box” to distribute the latest news as we get closer to launch. Stay tuned.
GeoCam is located on the left on this image taken during the Hang test.

NEXRAD readings can be found here. There is also a Google Mash up with Nexrad results for the U.S. at itsweather.com.

More images of the hang test can be found here. The new CFP for next year can be found here.
Haze over Nuevo Mexico

Sunday, August 27, 2006
It may get cold but we ain't gonna trip

John and I decided to cut the wires for the heaters for two reasons:
- Greg Guzik was not too happy when our amp count was over our self described limit of 0.5 amps.
- We don't know if there is a possibility our amp drawing might trip the fuse set on our payload (1 amp).
Since we did not have any resistance off hand, we decided that, given the fact that the camera would at least produce about 4 watts of heat, it would be able to survive the cold temperatures on the way up and at cruising altitude. I believe we can deal with the uncertainty on the temperature (computed to be OK for an ideal one node case) than the possibility of tripping and shutting down our payload. [ This was written before John left. He and Franky decided to leave the heaters on ]
The payload was cycled through several power on and off of the whole HASP payload and it was shown that our camera started as expected. Our request to the Balloon folks is to power us on as soon as HASP launches. John should have several shots of another balloon sent off yesterday.
Saturday, August 26, 2006
How hot is it going to get ?
Here is a small spreadsheet showing the one node computation that features what happens if we use black or white paint on the outside of the GeoCam box. That box is gonna be white....
John and Franky tested the power-on/off behavior of the camera which acted as it should. They have a concern that the servo pushing the clicker might be pushing too far but the folks at HASP integration told them it would be OK.
There is an expectation to have the flight go for twenty hours. After that, it will be flown by the folks at NASA back to Fort Sumner where it will be shipped back to LSU. We should be either picking up our payload in Louisiana or have it Fedex'ed.
New Item on the checlist: wipe out the card before leaving.
John and Franky should be heading back home today.
Friday, August 25, 2006
Labor Day Launch ?
Here is the latest from Greg Guzik:
Flight Requirements Review went well. We are looking for a desired 20 hour flight at an altitude of 124,000 feet. The maximum lift of the 11 million light is 2,875 pounds and the HASP weight is about 1,850 pounds (including 400 pounds drive up ballast). We may or may not be able to carry more ballast to maintain altitude after sunset. The limit is imposed by the parachute load which is currently set at 2,000 pounds.
We are expecting to complete integration this weekend and do the official hang test next Monday (August 28). At that point we will be Flight Ready and we are projecting a launch window from August 29 through September 8.
There will be a test flight launch and at least a 24 hour standdown prior to HASP launch. Thus, HASP will not launch until after the pathfinder and at least 48 hours after the initial launch. Current best GUESS from the CSBF folks is a HASP launch sometime around Labor Day weekend. Regular weather briefings will begin early next week.
For those of you not in the U.S., Labor day is September 4 this year.
Thursday, August 24, 2006
Waiting to Image
Integration of HASP with the CSBF systems will occur between August 21 and August 24. GeoCam should begin integration on Friday. Flight Readiness Review is expected for August 28. HASP will be a dawn launch and the first flight opportunity might be as early as August 29. According to Greg Guzik, the HASP manager
However, there is no guarantee for a launch on any particular day, range of days or before or after a day. This is due to a combination of ground weather conditions plus high altitude wind direction and speed. AT BEST, we will have 24 hours notice of a POTENTIAL launch. Be aware that it is NOT unusual for a POTENTIAL launch to be canceled. It is also not unusual for the payload to be rolled to the launch pad and everything be setup (except for taking the balloon out of the box) and the launch be canceled. (It is unusual for the launch to be canceled if the balloon is out of the shipping crate.) We may, therefore, wait days to a week or two for the right conditions.
John and Franky are leaving this morning for the Fort Sumner airport.
Monday, August 21, 2006
Orders of magnitude
It looks like our imaging capability will allow us to record data for about 600 kms (at 50 mph balloon speed) on a swath of land of about 20 kms. HASP will be at 120,000 feet (or 38 kms) up and we are taking a 15 degree tilt angle for our camera in order to take full advantage of the rotation induced by the balloon (see previous entry.)
We will launch from Fort Sumner, New Mexico. Here is what a our trajectory could look like over New Mexico and Arizona. The same dimension can be mapped over other regions of interest for our type of project: New Orleans and the Mississippi coast and California.
Saturday, August 19, 2006
Trajectory analysis - avoiding Murphy's law.
Much of our design rests on an assumption that using the swinger servos, we can pretty much cover a nice swath of land (as opposed to just looking down or Nadir). In order to accomplish this, we designed the swinger servos that would allow us to cover larger land mass by swinging the camera back and forth. However, HASP has the particularity of letting its large payload rotate at a speed of about 1rpm. Why not use the payload rotation to replace the movement we provide with the swinger servo ? This is what we are considering.
If you evaluate the swath of land being swept here is what you obtain (no payload spin):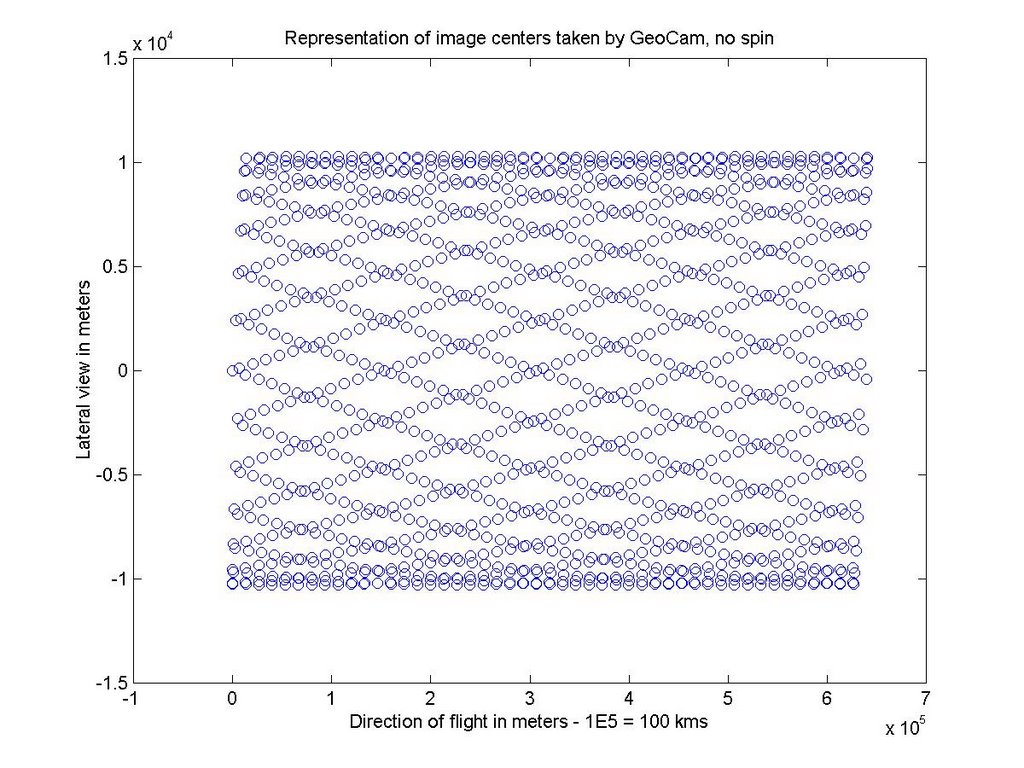
This result can be obtain by changing everytime the swing angle of the camera as shown here:
Whereas if you tilt GeoCam sideways (15 degree angle) and use the rotation of HASP this is the swath you obtain: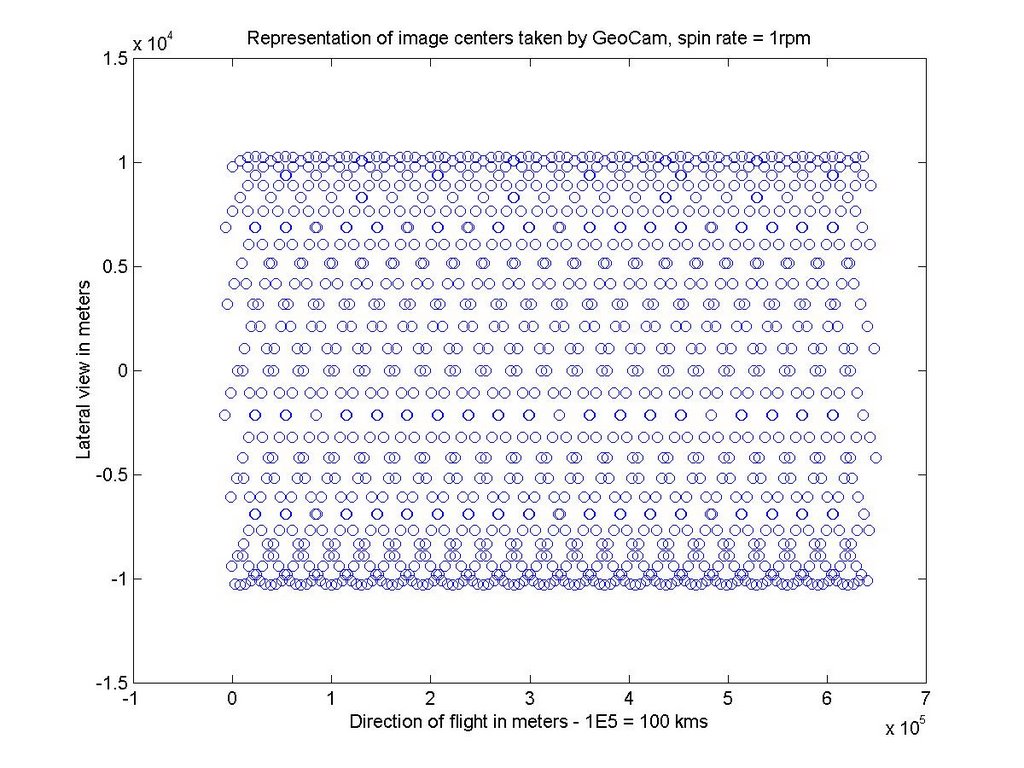
with a constant swinger angle
Not having to use the swinger servo and using HASP rotation might be a good option.
Here is the short matlab program that produced these figures (one might note we are taking a picture every 23 seconds.)
clear
alt=120000*.32;
t=[0:23:8*3600];
%th=10*sin(pi/10.*t./23);
th=15*sin(t./600*2*pi);
dist=tan(th/180*pi)*alt;
omega=2*pi/60;
v=50*1.6*1000/3600;
r=1.06+dist;
x=v.*t+r;
y=r;
figure(1)
plot(x,y,'o')
xlabel('Direction of flight in meters - 1E5 = 100 kms')
ylabel('Lateral view in meters')
title('Representation of image centers taken by GeoCam, no spin')
figure(2)
plot(th,'*')
xlabel('Direction of flight in meters - 1E5 = 100 kms')
ylabel('Swinger angle')
title('Representation of the required swinger angle of GeoCam in the no spin case')
%
th=15*ones(size(t,2),1);
dist=tan(15/180*pi)*alt;
r=1.06+dist;
x1=v.*t+r.*cos(omega.*t);
y1=r.*sin(omega.*t);
figure(3)
plot(x1,y1,'o')
xlabel('Direction of flight in meters - 1E5 = 100 kms')
ylabel('Lateral view in meters')
title('Representation of image centers taken by GeoCam, spin rate = 1rpm')
figure(4)
plot(th,'*')
xlabel('Direction of flight in meters - 1E5 = 100 kms')
ylabel('Swinger angle')
title('Representation of the required swinger angle of GeoCam, spin rate =1 rpm')
Thursday, August 17, 2006
GeoCam parameters estimation
We set up a small Google speadsheet to compute the GeoCam parameters estimation . It looks like, we can have a resolution of about 1.6 meters or 5 feet on the ground per pixels when looking Nadir. This spreadsheet assumes only longitudinal path. In order to take into account the effect of the swinger (broom like behavior of our set up), we need to make sure that the yellow numbers are well within the blue one (in order to ensure some type of longitudinal overlap between nadir photos.
Tuesday, August 15, 2006
Monday, August 14, 2006
Last Week before Integration

Integration tests at LSU went very well. The LSU HASP project now has a website up and running. We are payload 3 on HASP. They will provide Google Maps tracking of the balloon (we will produce a similar one) and one will to watch the view from the balloon with the CosmoCam (watch a movie here). Current expectation is for the balloon to be launched between August 28th to September 4th. We now need to check if the camera will survive the low temperatures expected at 120,000 feet. For this, we will use an environmental chamber at the Spacecraft Technology Center.
Subscribe to:
Posts (Atom)
