[Slashdot readers]
An interesting use of the data from GeoCam is to see how stitching algorithms are performing with data from our balloon flight. An algorithm developed by Matthew Brown does this automatically through the comparison of SIFT points and a RANSAC algorithm determining good fit. The software is available at the AutoStitch web page.
We first tried stitching five photos together and obtained a reduced file (200 KB as opposed to 5 times 3.2 MB)
We then went on using about 100-200 frames per panoramas and obtained the following views:
It seems evident that the payload wasn't turning at 1 rpm.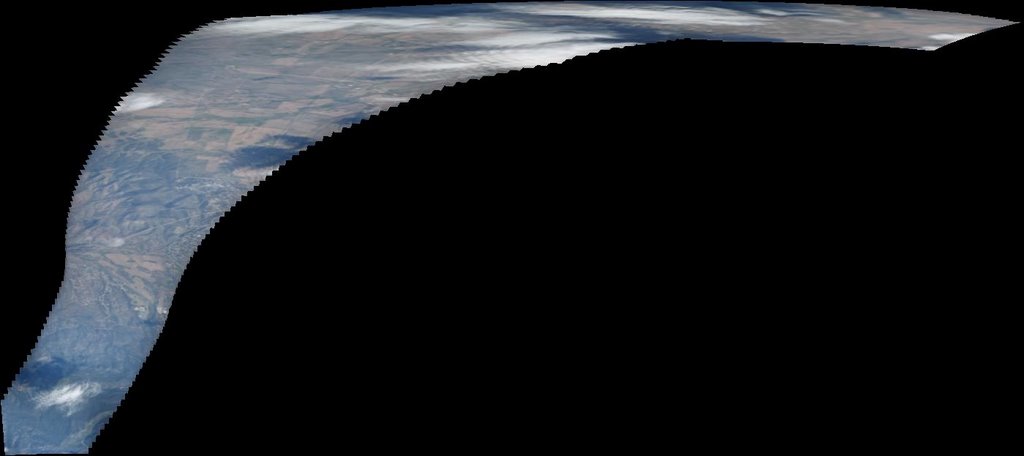

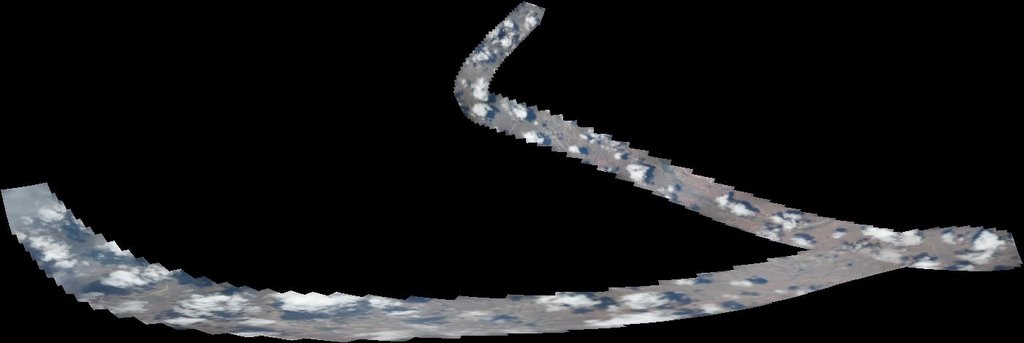

One of the apparent issues seems to be that the comparison for overlap between frames was based on cues from the clouds. Since we took photos at intervals of about 23 seconds, some of these clouds changed location and eventually allowed for some of the panoramas to be unduly stretched.
Saturday, September 30, 2006
Panoramic views
![]()
![]()
Subscribe to:
Post Comments (Atom)

10 comments:
How complex would it be to work a gyroscope or an electronic compass/inclinometer into your image placement instead of merging a paranoram?
It would cost more, about $1000 more, this can be done, however, the goal of our little experiment is to show how non professionals could contribute some data to map some disaster area. Anybody can go into an electronics store and buy this camera and a GPS. It takes more time to get a gyroscope or some heading device. Thanks for the comment.
Doesn't the GPS provide compass information? I was fairly sure most/all did.
A GPS can tell which way you're moving by comparing past and present locations. This works fine for land navigation, but might not be appropriate to determine the orientation of a photograph.
yes, GPS does provides heading at 1 minute interval. Besides the fact that the GPS is not on the camera in this set-up, it could not give us an accurate reading when taking shots spearated by 23 seconds difference. What is not clear (and we will make it clear later is that the camera can actually point in several directions). Also having a gyroscope, implicitly means that we need to have a cpu of some kind to record the data.
How about multiple cameras in a hemispherical configuration? Seems like the logical next step. Great results so far. Keep it up!
Fluxgate magnetic compasses are fairly cheap. Use one to give you a heading reference for each photo and combine it with GPS data. http://en.wikipedia.org/wiki/Fluxgate_compass
i'd say an obvious improvement would be to filter out SIFT points that are in clouds. for many terrains, automatically discriminating between land and clouds would actually be easy. and for those areas that are completely overcast ... well you aren't getting any interesting data there anyways.
You could use an enhanced version of autostitch, for example autopano pro.
It's an highly improved stitching software. Better RANSAC, better SIFT (you can handle where feature are placed, fore example to handle clouds ). Just try the demo at the official website : http://www.autopano.net
I don't think stitching pictures is something new or exciting. The PhotoStitch, provided by Canon for PowerShot series camera, can automatically stitch pictures, and that was provided two years ago.
Post a Comment